Can MATLAB be used for robotics?
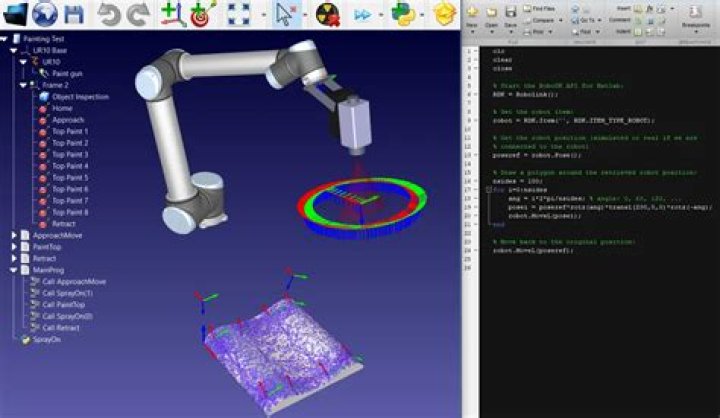
Robotics researchers and engineers use MATLAB® and Simulink® to design, simulate, and verify every aspect of autonomous systems, from perception to motion. Model robotic systems down to the finest details such as sensor noise and motor vibration.
Is MATLAB important for robotics?
Robotics researchers and engineers use MATLAB and Simulink to design and tune algorithms, model real-world systems, and automatically generate code – all from one software environment. With MATLAB and Simulink, you can: Connect to and control your robot with the algorithms you develop.
What is the inverse kinematics problem for a robotic arm?
Inverse kinematics refers to the reverse process. Given a desired location for the tip of the robotic arm, what should the angles of the joints be so as to locate the tip of the arm at the desired location. There is usually more than one solution and can at times be a difficult problem to solve.
What coding is used for robotics?
The most popular language in robotics is probably C/C++ (C++ is an object-oriented successor to the C language). Python is also very popular due to its use in machine learning and also because it can be used to develop ROS packages – see below.
Is MATLAB and C++ similar?
In MATLAB classes, there is no equivalent to C++ templates or Java generics. However, MATLAB is weakly typed and it is possible to write functions and classes that work with different types of data. MATLAB classes do not support overloading functions using different signatures for the same function name.
How do you solve inverse kinematics in Matlab?
ik = inverseKinematics creates an inverse kinematic solver. To use the solver, specify a rigid body tree model in the RigidBodyTree property. ik = inverseKinematics( Name,Value ) creates an inverse kinematic solver with additional options specified by one or more Name,Value pair arguments.
How do you find the inverse kinematics of a robotic arm?
Draw the Kinematic Diagram of Just the First Three Joints and Do Inverse Kinematics
- θ2 = tan-1(y/x)
- d3 = sqrt(x2 + y2) – a3 – a4
How is a robotic arm made?
A typical robotic arm is made up of seven metal segments, joined by six joints. The computer controls the robot by rotating individual step motors connected to each joint (some larger arms use hydraulics or pneumatics). The robot uses motion sensors to make sure it moves just the right amount.
What is the best coding language for robotics?
C++
Two main programming languages are the best when used in robotics: C++ and Python, often used together as each one has pros and cons. C++ is used in control loops, image processing and to interface low-level hardware. Python is used to handle high-level behaviors and to quickly develop tests or proof of concepts.